-
-

- © www.tetis-pro.ru
Во Владивостоке на базе водно-спортивной станции ЦСКА завершился первый этап всероссийских соревнований по морской робототехнике «АКВАРОБОТЕХ-2018». Организаторами первенства выступили Фонд перспективных исследований и коллегия Военно-промышленной комиссии Российской Федерации при поддержке Минобороны России, Минвостокразвития России, Минобрнауки России, АО «Объединенная судостроительная корпорация», Дальневосточного федерального университета, Морского государственного университета имени адмирала Г. И. Невельского, Фонда Росконгресс.
-
-
-

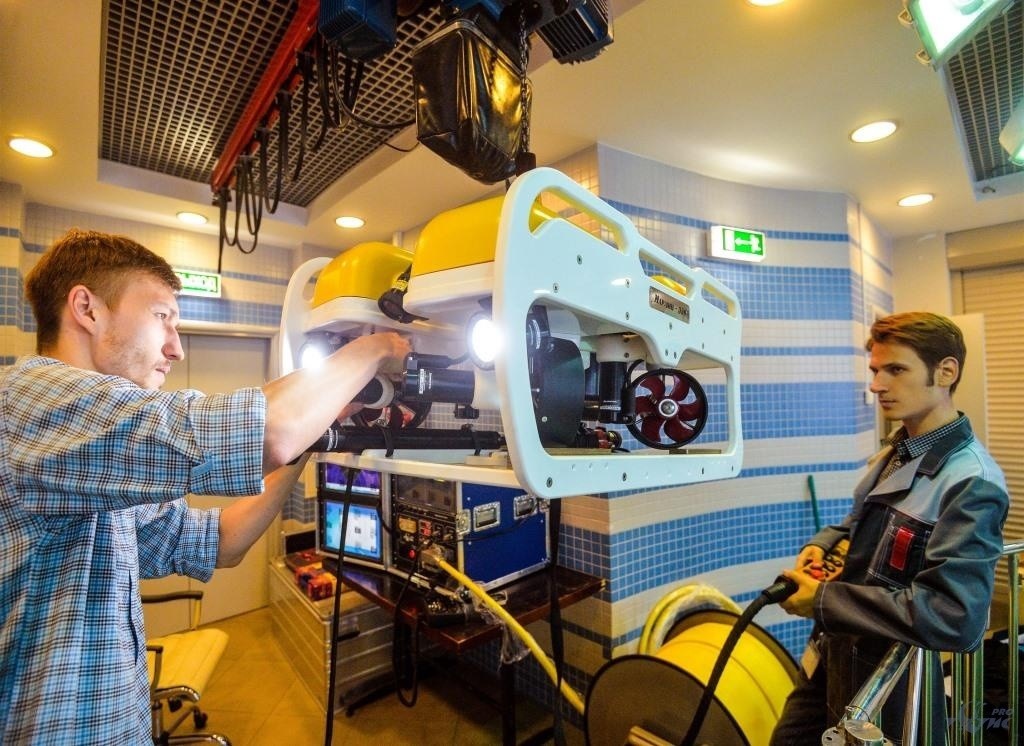
- © www.tetis-pro.ru
Студенты МГТУ им. Баумана проходят преддипломную практику в «Тетис Про» на базе отдела телеуправляемых необитаемых подводных аппаратов и гидроакустических систем.
Это уже десятый поток студентов, который получает опыт в компании. В этом году в рамках практических занятий, рассчитанных на месяц, запланировано изучение техники для проведения подводных работ, документации, сборочных процессов и ремонта телеуправляемых необитаемых аппаратов «Марлин-350». В качестве задания будущие конструкторы разрабатывают 3D модели отдельных элементов подводных аппаратов.
Коллективы «Тетис Про» и МГТУ им Н.Э. Баумана давно связывают деловые и дружеские отношения. Соглашение о взаимном сотрудничестве было подписано между нашими организациями еще в феврале 2009 года. Эксплуатационная практика дает возможность студентам увидеть перспективы своей будущей профессии и применить свои знания на практике.
-
-
-

- © arms-expo.ru
Компания «Тетис Про» произвела уже 30 отечественных компактных подводных роботизированных комплексов Марлин-350. Все они произведены по заказу ВМФ России.
Российский компактный подводный роботизированный комплекс Марлин-350 предназначен для обнаружения и идентификации объектов на глубине до 350 метров.
©Видео с youtube.com/ https://www.youtube.com/embed/kXQI2CuLc0g?t=15m38s
-
-
Российский глубоководный подводный аппарат «Моби Дик», разработанный волгоградской лабораторией подводной робототехники, в апреле успешно завершил испытания в озере Байкал. Робот достиг глубины в 850 м, исследовав дно озера."Моби Дик" испытывали с 7 по 14 апреля. Он стал первым из отечественных подводных роботов, который достиг подобной глубины.
Аппарат обследовал дно Байкала на глубине в 650 метров и опустился на 850 м. При этом и спуск, и подъем осуществлялся за счет работы собственных двигателей. Первоначально «Моби Дик» планировали опустить на дно в точке с километровой глубиной, однако этому помешало место погружения, где расстояние от дна до поверхности было больше 1200 м.
-
-
Будущее, когда обнаружение подводных лодок противника перестанет быть проблемой для российского флота, уже наступило. Разрабатываемый подводный роботизированный автономный необитаемый аппарат-планер, который называют глайдером, успешно прошел испытания, расширившие его возможности. О том, что из себя представляет глайдер и где он может применяться, сайту телеканала «Звезда» рассказали в научно-производственном предприятии «Океанос».
По словам экспертов, за рубежом разработки в этом направлении ведутся уже несколько десятков лет. Среди уже созданной техники -донные базовые станции, ретрансляторы, беспилотные подводные робототехнические системы наблюдения за подводной обстановкой. Все последние разработки интегрируются в единые системы и отвечают принципу ведения сетецентрической войны.
Подобные разработки есть и в России. Двадцать седьмого октября под Санкт-Петербургом состоялись демонстрационные спуски подводного глайдера, разрабатываемого Санкт-Петербургским государственным морским техническим университетом (СПбГМТУ) и ЗАО «Научно-производственное предприятие подводных технологий «Океанос». Разработку аппарата курируют в Главном научно-исследовательском испытательном центре робототехники Минобороны РФ.
-